Revolutionary Underwater Robot Enhances Deep-Sea Exploration with Advanced Soft Actuators and Dynamic Landing Stability
October 6, 2024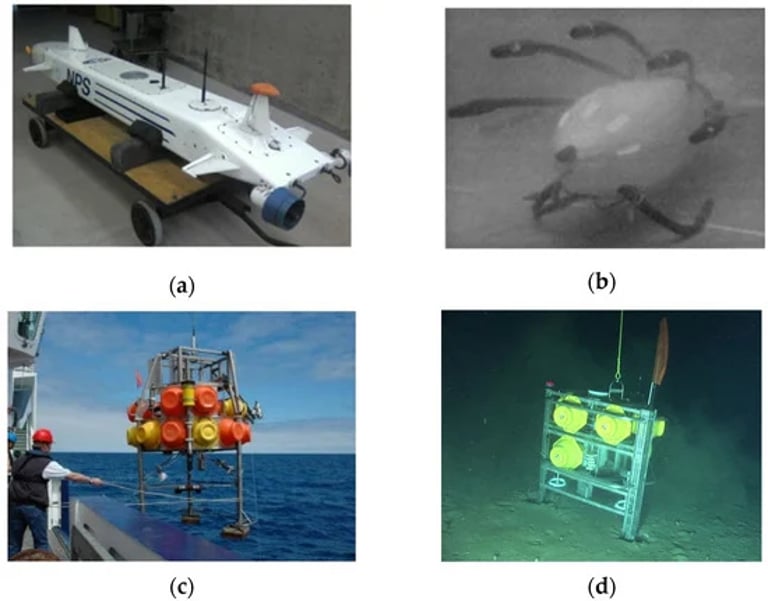
To simulate the robot's penetration into the seabed, numerical methods, particularly the Arbitrary Lagrangian–Eulerian (ALE) method, were employed.
Force analysis during penetration identified key factors affecting depth, including the robot's weight, initial velocity, and the properties of the seabed soil.
Overall, this study aims to provide valuable insights for the design and application of underwater robots, optimizing their performance and enhancing reliability in deep-sea exploration.
The early concept of seabed landing for underwater robots was developed by the U.S. Navy, paving the way for advancements in designs that minimize landing damage.
Traditional robotic arms pose risks of damaging delicate objects due to rigid contact, making soft actuators a safer alternative for handling fragile items.
Underwater robots have evolved significantly, enabling them to adapt to harsh environments and perform long-duration tasks, which supports in situ observations of deep-sea areas.
The residency technique employed by these robots allows for long-term fixed-point monitoring, thereby enhancing data collection and interdisciplinary cooperation in marine science.
The study emphasizes the dynamic landing process of this novel robot on various soil types at different impact velocities to ensure a safe landing.
Central to this research is the underwater soft bending actuator (USBA), which utilizes water pressure for bending and is constructed from silicone with specific density and hardness.
Experiments conducted in a water cylinder were crucial for measuring the performance of the USBA, ensuring accurate data collection for parameter identification.
A newly designed underwater robot has been introduced, featuring four rigid support legs and footpads to enhance stability and safety during landing on the seabed.
Simulation results revealed that penetration depth is significantly influenced by seabed soil characteristics, such as density and shear modulus, with varying resistance for clay and sandy soils.
Summary based on 2 sources

